


结构图:
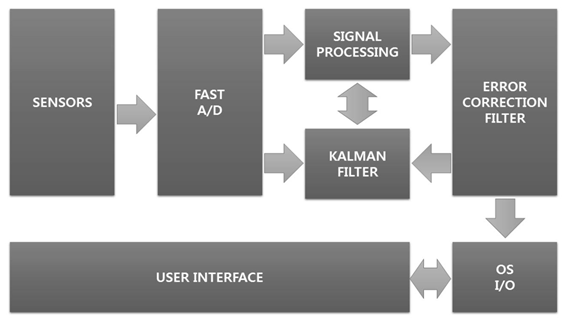
特征:
●UART/I2C输出(可选)
●低功耗
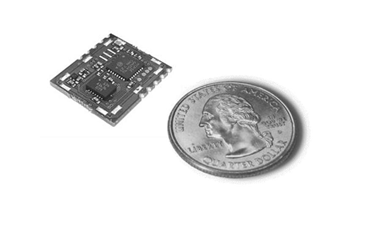
●紧凑的封装
●定制带宽(可选)
●快速启动
●完全独立
●角速率输出
●偏航角输出
●3轴加速度输出
应用
●机器人导航
●平台稳定
●姿态参考系统
●制导和控制系统
●无人飞行器(UAV)还有,微型飞行器
●汽车测试
●汽车仪表
●清洁机器人
●与爱普生GGPM01完全PIN对PIN
系统启动:
CruizCore R6083V 启动时间不到1秒,它对温度变化引起的误差进行内部补偿。但是,开机后不久温度的突然变化会导致静态速率误差,如果这样的温度变化是预期的,我们建议让陀螺仪静止5秒后启动。在启动期间,要求CruizCore R 6083V固定在水平表面,以获得最佳性能。







